企業リリース Powered by PR TIMES
PR TIMESが提供するプレスリリースをそのまま掲載しています。内容に関する質問 は直接発表元にお問い合わせください。また、リリースの掲載については、PR TIMESまでお問い合わせください。
(2022/12/23)
カテゴリ:商品サービス
リリース発行企業:株式会社VOLLMONTホールディングス
都心部の複雑な工事現場における、車両誘導の完全自動化をめざす!
~「SECURITY SHOW 2023」(2/28~3/3:東京ビッグサイト)に出展予定~
株式会社VOLLMONTホールディングスは、当社の事業である「交通誘導警備」において、最新センサー技術と画像認識技術を用いて、車両の片側交互通行の誘導を自動化する、車両片側交互通行誘導ロボット「Comune+(R) model-S (コミューンプラス モデルエス)」を開発いたしました。
VOLLMONTは、「Comune+(R)」シリーズの開発を通じ、安全性確保や人手不足といった、交通誘導警備を取り巻く課題解決へ向け、引き続き尽力してまいります。来る「SECURITY SHOW 2023」(2023/2/28(火)~3/3(金):東京ビッグサイト東展示棟)にて、「model-S」を出展いたします(小間番号:SS3008)。
株式会社VOLLMONT(フォルモント)ホールディングス(住所:東京都青梅市、代表取締役:望月武治、以下VOLLMONT)は、当社の事業である「交通誘導警備」※1において、最新センサー技術と画像認識技術を用いて、車両の片側交互通行※2の誘導を自動化する、車両片側交互通行誘導ロボット「Comune+(R) model-S (コミューンプラス モデルエス)」を開発いたしました(以下、「model-S」)。前回の「SECURITY SHOW 2022」(2022/3/1~3/4)では、「Comune+(R) model-2」(以下「model-2」)として、製品コンセプトのみを発表いたしました。今回、新製品「model-S」として、機能向上と新機能が搭載され、実機として完成いたしました。
VOLLMONTは、「Comune+(R)」シリーズの開発を通じ、安全性確保や人手不足といった、交通誘導警備を取り巻く課題解決へ向け、引き続き尽力してまいります。
来る「SECURITY SHOW 2023」(2023/2/28(火)~3/3(金):東京ビッグサイト東展示棟)にて、「model-S」を出展いたします(小間番号:SS3008)。
「SECURITY SHOW 2023」に来場予定がございましたら、巻末の申込書から弊社担当者宛にご連絡いただき、当社ブースにお立ち寄りいただければ幸いです。
※「SECURITY SHOW 2023」では、「model-S」本体センサー部を展示し、現場での利用について説明いたします。
※1)交通誘導警備:民間警備会社による警備業務であり、警備業法第二条第二号に規定されている業務。都市空間や大規模イベント等での事故防止にあたる「雑踏警備」と共に、二号警備とも言われる。交通誘導警備は、主に道路工事や建築工事、高速道路、商業施設での事故防止を行い、それぞれの現場での車両や歩行者の誘導が主な業務である。歩行者誘導員は、交通に支障がある箇所や、歩道や車道をふさぐ工事現場やイベント開催時での歩行者の誘導を行う。
※2)片側交互通行:道路工事等において、一車線に対して双方向からの車両を通行させるもの。交通誘導警備の中でも、最も難易度が高く、誘導員・車両とも事故が発生する恐れが大きい。

■車両片側交互通行誘導ロボット「Comune+(R) model-S」とは:
「model-S」は、当社の熟練誘導員の技術をシステム化し、道路工事現場における車両誘導の自動化を図るロボットとして開発されました。前回の「SECURITY SHOW 2022」(2022/3/1~3/4)では、「model-2」として、最新センサー技術と画像認識技術を用いて、車両の片側交互通行を最適なタイミングで制御し、また、工事現場及び車両誘導のデータをクラウド上で共有・遠隔で監視する、という製品コンセプトを発表いたしました。
<基本的な誘導プロセス>
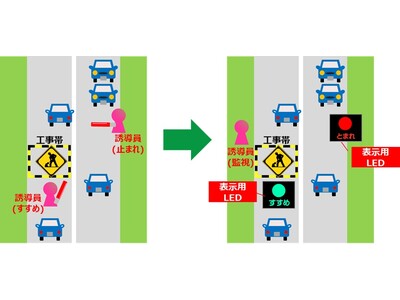
「model-S」の基本的な誘導プロセスは以下の通りです。
「model-S」に搭載されたカメラ・レーダーにて付近の交通状況を検知し、「工事帯から車両が通過したか」「工事帯両端の渋滞が長くないか」「車両が接近していないか」「付近の信号変化サイクルはどうなっているか」といった判断を踏まえ、LEDに表示する「すすめ/止まれ」を切り替えます。
カメラ画像により、工事帯へ侵入する車両を検知し、「すすめ/止まれ」を判断するため、工事帯に接する枝道・駐車場からの進入車両にも対応することができます。
「すすめ/止まれ」を切り替えるサイクルは、付近に信号が設置されている場合は、信号のサイクルを優先します。一方で、信号が無い場合は、工事帯両端の渋滞状況を踏まえ、渋滞が最小となるよう、交通量の多い車線に「すすめ」時間が多く配分されます。
基本的には、「model-S」が自動で判断を行いますが、異例事態が発生した際は、ロボットの監視を行っている誘導員が手動で「すすめ/止まれ」を切り替えます。

■車両片側交互通行誘導ロボット「Comune+(R) model-S」の新機能:
「model-2」開発以降、VOLLMONTは実証実験を重ね、本日発表する「model-S」の新機能開発、及び既存機能の精度向上に努めてまいりました。実証実験については、実機を用いて東京都内で実施するもののほか、交通シミュレータを用いた実証実験も重ねています。
交通シミュレータには、実際の工事現場の状況や、交通量を元にデジタルツインを構築しております。実機を用いた実験が時間・場所に制約される一方、シミュレータでの実証はその点を解消できます。交通シミュレータを通じ、365日24時間実証を行うことで、加速度的な機能改善が可能です。
◆「model-S」の新機能や機能改善については以下の通りです。
<ロボットの設置に関する機能>
●「自動セットアップ」機能:
誘導員は、現場の状況に合わせて誘導パターンを判断する必要がありますが、「model-S」は、道路の形状や道幅、センターライン・信号の位置などを自動で認識し、誘導パターンを自動設定できます。PCやシステム操作に馴染みが無くても、工事帯に設置するだけで簡単にシステムのセットアップができます。
<安全性確保に関する機能>
●「最後尾車両の確認」機能の精度向上:
「model-S」の安全性確保の根幹的な機能として、工事帯を通行する最後尾の車両を確認する機能が備わっています。誘導プロセスでは、この「最後尾車両」の通過を確認し、工事帯両端の「すすめ/止まれ」を切り替えます。最後尾車両の確認が不十分なまま「すすめ/止まれ」を切り替えると、車線内で車両が正面衝突する恐れもあるため、誘導員にとっても必須のスキルであり、ロボット化に際し最重要の機能となります。
「model-S」では、カメラで車両の進入・離脱を認識するとともに、「止まれ」の切替え直前の車両のナンバーを認識する二重の確認を行っています。「mode-S」の開発に当たり、実証実験と誘導プロセスの改善を重ねることで、本機能の精度を向上させ、誘導ロボットの安全性を高めています。
●「『止まれ』突破対応」機能:
片側交互通行の誘導において、「止まれ」と表示をしても、車両に無視され、突破されてしまう点は、誘導員による誘導であっても大きな課題となっています。
「model-S」は、「止まれ」表示に切替え後の先頭車両について、レーダーで接近車両の距離・スピードを検知し、停止線で確実に停止できるかを事前に判断し、誘導の判断に反映します。(止まれないと判断した場合は、反対車線を「すすめ」と表示しません)
<誘導の高度化に関する機能>
●信号対応の高度化:
「model-S」は、工事帯付近に設置された信号の変化タイミングを認識し、その結果を「すすめ/止まれ」判断にて考慮しています。
「model-2」では、工事帯外側に設置された、1つの信号までを考慮できましたが、「model-S」では、工事帯の両端に設置された2つの信号(現状では同期している場合に対応、今後は非同期の信号も対応予定)への対応、及び、工事帯の内側に設置された1つの信号への対応が可能となっています。
●「商用車認識」機能:
先頭車両が商用車(バス等)の場合、商用車を優先して、短いサイクルで「すすめ」とすることも可能です。また、付近のバス停にバスが停止していても、停止車両とは認識せず、短時間で再度動き出すことを想定して、プロセスを組み立てることもできます。
●「緊急車両認識」機能:
緊急車両のサイレン音を認識し、誘導員に通知する機能を搭載しました。緊急車両を検知すると自動で両側の信号を停止に変更することも、検知結果を誘導員に提示して、誘導員がサイレン音を確認後に手動で「止まれ」表示を行うことも可能です。この機能を利用して、確実に緊急車両を優先的に誘導することができます。
■産学連携体制
「model-S」開発にあたり、VOLLMONTでは最先端の技術を開発に取り込むべく、産学連携体制を構築してまいりました。「model-S」に利用されている画像認識技術開発については、早稲田大学 グリーン・コンピューティング・システム研究機構 上席研究員 研究院教授 速水 悟(はやみず さとる)先生と連携しています。
<交通誘導警備・片側交互通行における課題>
交通誘導警備には、以下の課題があります。通行者、建設従事者の安心・安全を守るためには、ロボット化による交通誘導警備の高度化・効率化が必須の状況となっています。
■工事現場での「交通誘導警備」に役立つロボット技術の開発
警備業界では「交通誘導警備」を行う交通誘導員の人手不足や高齢化といった問題があり、工事の不調や中止原因になっております。また、電気・ガス・上下水道といった、ライフラインの老朽化・耐震化対応等、路上工事需要は引き続き各所で見込まれ、「交通誘導警備」の需要は高まっていくと考えられます。
そこで、人手不足や高齢化の課題に対応する交通誘導の補助システムとして、交通誘導ロボットを開発することにより、持続的な社会の実現を目指しております。2020年9月には「Comune+(R) model-1 (コミューンプラスモデルワン)」(以下、「model-1」)の開発発表を、2022年3月には、「SECURITY SHOW 2022」において、「model-2」の製品コンセプトを提示いたしました。
<Comune+(R) model-1の概要>
VOLLMONTは、「model-1」を2020年9月に開発し、工事現場等での実証実験等を行っています。「model-1」は、最新の認識技術と AI を搭載し、業界に先駆けて、交通弱者※3の識別機能を備えた歩行者誘導システムです。工事現場を通行する歩行者が子どもか成人か、通行に手助けが必要な人なのかを瞬時に判断し、相手に合わせたメッセージを使い分けます。歩行者が手助けを求めた場合には、「model-1」を通じて現場にいる誘導員に通知され、誘導員がかけつけます。
また、歩行者が待っている間に感じるストレスを少しでも軽くするために、時にはチャーミングなセリフで場を和ませるなど、人間味のある設計としています。
※3)交通弱者:ここでは交通事故の観点からの交通弱者を指し、子供や高齢者、障害者など、交通事故に遭いやすい人のことをいう。
「model-1」の実証風景")
■AIやクラウド、IoT等の技術の活用でより安心安全な社会づくりをめざす
「model-1」や「model-S」にはAIやクラウド、IoT等の最新技術が活用されております。また、弊社が長年蓄積してきた、交通誘導警備の経験やノウハウを備えております。今後も最新技術を活用して、熟練の誘導員に匹敵する交通誘導ロボットシステムに機能向上を図り、より安心安全な社会づくりとともに、現場等で働く人にとっても働き甲斐のある職場環境づくりを進めてまいります。
<「SECURITY SHOW 2023」VOLLMONTホールディングス ブース概要>
■日時:2023年2/28(火)~3/3(金)
■会場:東京ビッグサイト東展示棟
■小間番号:SS3008
■内容:車両片側交互通行誘導ロボット「Comune+ model-S」展示物・システム展示
※時間・収容人数が限られていますので、お早めにお申し込み下さい。
■「株式会社VOLLMONTホールディングス」について
VOLLMONT(フォルモント)ホールディングスは、警備を通じて社会の安全と発展に寄与するために、1985年7月に西東京セキュリティサービス株式会社として設立
1985年8月、東京都公安委員会の認定を受けて、警備会社としての営業を開始
2005年6月、株式会社VOLLMONTホールディングスと社名変更するとともに、各支社を独立法人として改組
2010年10月、警備保障のプロフェッショナル育成を行う株式会社VOLLMONTアカデミーを設立
2012年12月、独立法人VOLLMONT各社の警備部門を合併し、株式会社VOLLMONTセキュリティサービスと社名変更。関東に広がるフォルモント・ネットワークを構築。次代の安心・安全な社会づくりに貢献しています。
URL:https://www.vollmont.co.jp/
【お問い合わせ先】
株式会社VOLLMONTホールディングス 広報担当
住所:〒198-0024 東京都青梅市新町1-5-5
TEL:0428-32-8777(代表)、FAX: 0428-33-6277
E-mail:robo@vollmont.co.jp
URL:https://www.vollmont.co.jp/
※「Comune+」はVOLLMONTホールディングスの登録商標または商標です。
※記載されている会社名、製品名は、各社の登録商標または商標です。
企業プレスリリース詳細へ
PRTIMESトップへ
※ ニュースリリースに記載された製品の価格、仕様、サービス内容などは発表日現在のものです。その後予告なしに変更されることがありますので、あらかじめご了承下さい。



























