企業リリース Powered by PR TIMES
PR TIMESが提供するプレスリリースをそのまま掲載しています。内容に関する質問 は直接発表元にお問い合わせください。また、リリースの掲載については、PR TIMESまでお問い合わせください。
(2023/6/7)
カテゴリ:商品サービス
リリース発行企業:キヤノンITソリューションズ株式会社
キヤノンマーケティングジャパングループのキヤノンITソリューションズ株式会社(本社:東京都港区、代表取締役社長:金澤 明、以下キヤノンITS)は、AGVやAMRに搭載して幅広い用途に活用できるVisual SLAMソリューション“自己位置推定システム with Vision-based Navigation Software”を2023年6月7日より販売開始します。


■背景
昨今、超スマート社会の実現に向けた取り組みのひとつとして、AGV(Automatic Guided Vehicle=無人搬送車)やAMR(Autonomous Mobile Robot=自律移動ロボット)、ドローン、人や物体などを認識して駆動するサービスロボットを活用した工場や物流、商業施設などでの自動化や無人化が進められています。これらの高度な自律性を持つロボットには、移動や動作に必要な周辺環境情報を的確に取得するため、眼の役割を果たす仕組みの精度が重要です。
この度キヤノンITSでは、位置姿勢計測や地図作成機能をもつ高精度なキヤノンのソフトウエア「Vision-based Navigation Software」と、HMS社製産業用AIスマートカメラ「SiNGRAY Stereo Pro」を組み合わせて提供するサービスロボットソリューション“自己位置推定システム with Vision-based Navigation Software”を販売開始します。
■特長
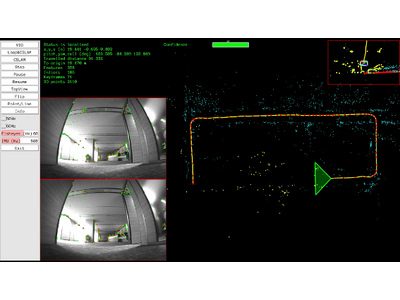
Visual SLAMは、移動ロボットの眼となるソフトウエア技術です。幅広い画角で撮影されたステレオカメラ撮影データを用いて、周囲の環境の3次元情報とカメラの位置や姿勢を同時に推定するため、レイアウト変化の多い現場にも柔軟に対応することができます。「Vision-based Navigation Software」のVisual SLAMは、立ち上げ時の高速な位置姿勢計測が可能で、また暗所や逆光に強く照明変動や外光環境への順応性が高いため、地図作成に必要なルート走行テストの回数を少なくすることができます。加えて、検出した特徴点の分布やルート走行で作成した地図、計測信頼度のメーター表示を同一画面上で閲覧可能なため、稼働環境によって発生する課題への対応の迅速化に貢献します。
キヤノンITSは、30年以上にわたり、カメラ、画像処理ボード、ソフトウエアを組み合わせた画像処理ソリューションをさまざまな製造現場に提供し、お客さまの抱える課題を解決してきました。“自己位置推定システム with Vision-based Navigation Software”の提供にあたっても、AGVやAMRなどの開発に必要なプログラム開発やステレオカメラでの評価をサポートし、お客さまの検証から実装に至るプロセスの短縮を支援します。
これまで主に製造業向けに提供してきた産業用カメラを用いた製品/サービスで培った画像処理ノウハウを活かし、今後はさらに、物流/移動、点検、配膳/給仕などの自動化/少人化ニーズに対応すべく、新しいサービスを提供してまいります。
参考)SLAM技術
SLAMはSimultaneous Localization and Mappingの略で、周囲の三次元情報から自己位置推定と環境地図作成を同時に行う技術です。SLAM技術は、周囲の情報(3次元情報)を取得するセンシングの違いで、大きく2つあります。1つは、LiDAR (Light Detection and Ranging) というレーザーセンサー (距離センサー)を用いた「LiDAR SLAM技術」で、もう1つは、カメラ・イメージセンサーから取得した画像データを用いたVisual SLAM技術です。
障害物への対応や周囲環境の識別などに課題があるLiDAR SLAM技術と違い、Visual SLAM技術は、映像情報をもとに自己位置推定を行うため、周囲の障害物や人の識別、コンセントや充電箇所などランドマーク(特徴物)の認識など、自己位置推定以外の様々な制御に活用できます。

●一般の方のお問い合わせ先:製造ソリューション事業部 ソリューション企画部 03-6701-3568(直通)
●画像処理ソリューションホームページ:https://www.canon-its.co.jp/solution/image/
●ニュースリリースホームページ:https://canon.jp/newsrelease
企業プレスリリース詳細へ
PRTIMESトップへ
※ ニュースリリースに記載された製品の価格、仕様、サービス内容などは発表日現在のものです。その後予告なしに変更されることがありますので、あらかじめご了承下さい。






























