企業リリース Powered by PR TIMES
PR TIMESが提供するプレスリリースをそのまま掲載しています。内容に関する質問 は直接発表元にお問い合わせください。また、リリースの掲載については、PR TIMESまでお問い合わせください。
(2018/11/20)
カテゴリ:商品サービス
リリース発行企業:株式会社リッコー
株式会社リッコー(本社:東京都中央区京橋2-2-1京橋エドグラン24F、代表取締役社長:原嶋芳之)と国立大学法人 豊橋技術科学大学(所在地:愛知県豊橋市天伯町雲雀ヶ丘1-1、学長:大西 隆)は、5指ハンドを有するマッサージAIロボットの共同開発をスタートしました。

本プロジェクトにおいて、リッコーと豊橋技術科学大学は熟練の按摩マッサージ指圧師と遜色のない施術法を再現する機器研究を開始します。我々はこの技術を取得、提供する事で、コリなど身体の悩みを持つ人だけではなく、施術者の肉体的負担の軽減や施術者の人手不足解消などの持続可能な社会貢献を目指します。
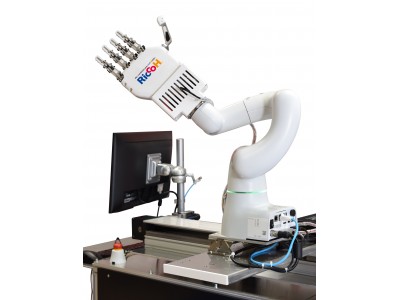
本プロジェクトでの目標は、人体を押す感覚や揉む感覚を、人工知能技術(以下、AI)を用いた制御にて行う5指ハンドロボットの開発です。本機器は熟練の按摩マッサージ指圧師の施術を再現し、AIが施術を行う度に個人に応じた施術内容を学習する「人に寄り添った」マッサージAIロボットを目指します。現在、ハードウェア部分の開発が終了し、AIソフトウェアの開発に取りかかっております。

豊橋技術科学大学システム制御研究室における研究で培われた基礎技術を進化させ、AIで最適な圧力制御を行えることを目指した、5指ハンドロボットです。
同研究室では、ヒトの手の多指多関節を模した(4本指13関節)ロボットハンドによる肩部マッサージの制御手法を過去に提案しており、指圧師の指先圧力の計測データにもとづく教師あり学習によるロボットハンドの動作制御システムを構築しています[1,2]。
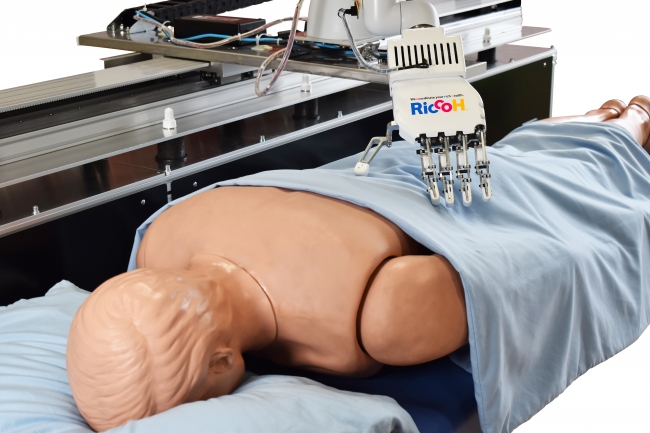
また、歩行リハビリテーションにおけるロボットアシスト技術の研究[3]も推進しており訓練者の身体の動き、関節、体重心などを高精度に計測する手法を提案するとともに、ヒトの歩行動作に追従して力をアシストするロボット技術を有しています [3] 。上記の研究成果を核として、今回新たにAIを用いて柔軟な制御を実装してくことを目的としています。これにより、「大きさや形状の個体差が大きい対象に即対応可能」で、「肩や腰といった一部分ではなく、全身に対応」し、「対象が多少動いても柔軟に追従」を行うことが可能になります。

本装置はカメラ制御部、位置決め部、ハンドロボット部と大きく3つの要素から構成されます。
カメラ制御部は、色調と奥行きが計測可能なRGB-Dカメラを搭載し、人体の肩や腰の位置を把握する事が可能となります。
位置決め部がハンドロボット部を搬送した後、施術が開始されます。
ハンドロボット部のハンドは、掴むための4指と押すことに特化した母指からなり、触覚センサで最適な力の付与を制御します。
学習項目として人間の動きをパラメータ化し、将来的にはAIによって最適で柔軟な指の動きを再現できるよう目指します。
また、制御情報をデータベースに格納し、分析を行い、施術を重ねるたびに個人に応じた最適な制御を行うことを目標とします。
<開発スケジュール>
フェーズ1:ハードウェア構築
フェーズ2:知能部分の開発とインテグレーション(ソフトウェア・ハードウェアの統合)
現在、フェーズ1が終了し、フェーズ2を開始する段階です。
[1] H.Kitagawa, T.Terai, P.Minyong and K.Terashima,Application of Neural Network to Teaching of Massage using Multi-fingered Robot Hand, Journal of Robotics and Mechatronics, 14 (2002) 2, PP.162-169
[2] K. Terashima, T. Miyoshi, K. Mouri, H. Kitagawa, P. Minyong, Hybrid Impedance Control of Massage Considering Dynamic Interaction of Human and Robot Collaboration Systems, Journal of Robotics and Mechatronics, Vol.21, No.1, pp.146-155, 2009
[3] 谷勇希,田崎良佑,寺嶋一彦:全方向移動式歩行訓練器における人の姿勢情報を利用した歩行追従制御,第35回日本ロボット学会学術講演会,3D2-04, 2017

■株式会社リッコーについて
「すべては、豊かな健康のために」の理念のもとに、独自技術の「Wave technology」で皆様の健康をサポートし、皆様が「Well-being(元気で幸せ)」な状態を維持し達成するプロセスが大切であると考え、「Well-being Lifeをsupportすること」が、当社の社会貢献活動と考えます。そのため国内に自社工場を有し、医薬品、医療機器等の品質、有効性及び安全性の確保等に関する法律(医薬品医療機器等法)の規定による「医療機器製造業許可」「第二種医療機器製造販売業許可」「医療機器修理業許可」を取得しております。また、国際標準化機構(ISO)が定める品質マネジメントシステムISO9001認証及び医療機器のISO13485認証を取得しています。
本 社:東京都中央区京橋2-2-1京橋エドグラン24F
代表者:原嶋芳之
設 立:平成4年5月
URL:https://i-riccoh.com/
■豊橋技術科学大学について
豊橋技術科学大学は、技術を支える科学の探究によって、新たな技術を開発する分野である技術科学の教育・研究を使命として設立されました。この使命のもと、世界に開かれたトップクラスの工科系大学を目指し、豊かな人間性と国際的視野および自然と共生する心を持つ実践的創造的かつ指導的技術者を育成するとともに、次の時代を拓く先端的技術の研究を行っています。そのため、大学院に重点を置き、透徹した物を見る眼、繊細で温かみのある感性、多元的な思考能力、グローバルな視野を培う教育を推進し、技術科学の新しい地平を切り拓くことを目指して研究に取り組んでいます。さらに、地域社会とも連携し、国内及び国際社会に開かれた技術科学の拠点となることを目指しています。
住 所:愛知県豊橋市天伯町雲雀ヶ丘1-1
学 長:大西 隆
開 学:昭和51年10月
URL:https://www.tut.ac.jp/
企業プレスリリース詳細へ
PRTIMESトップへ
※ ニュースリリースに記載された製品の価格、仕様、サービス内容などは発表日現在のものです。その後予告なしに変更されることがありますので、あらかじめご了承下さい。



























