企業リリース Powered by PR TIMES
PR TIMESが提供するプレスリリースをそのまま掲載しています。内容に関する質問 は直接発表元にお問い合わせください。また、リリースの掲載については、PR TIMESまでお問い合わせください。
(2023/6/5)
カテゴリ:商品サービス
リリース発行企業:ヴイストン

全車輪に独立ステアリングを搭載した四輪駆動台車の超大型モデル
ヴイストン株式会社(本社:大阪府大阪市、代表取締役:大和信夫)は、四輪独立ステアリング機構を搭載したROS対応の研究開発用台車ロボット「4WDSローバー X120A」を発売します。

■主な特徴
4WDSローバー X120Aは、四輪それぞれに独立したステアリング機構を搭載し、通常の車輪でありながら全方位への移動を実現した研究開発用台車ロボットです。既発売の「4WDSローバー X40A」と同様の高い静粛性や制御性を備えつつ、大型モーターの搭載やフレーム構造の強化などを行い、可搬重量約120kgを実現しました。
四輪独立のステアリング機構を備える本製品は、「メガローバーVer.3.0」に代表される弊社製のROS対応研究開発用台車ロボットのラインナップ中でも、特に静粛性と制御性に優れています。昨今の搬送用ロボットやコミュニケーションロボットの分野において求められる、「音声認識などを阻害しない静音動作」と「自動制御の基本となる高い位置決め精度」との両立を実現しており、高度なサービスロボットや特殊環境での搬送ロボットの研究・開発用途に適しています。
本製品においては、4WDSローバーの優れた基本性能をそのままに、可搬重量を約120kgまで大型化しており、様々な計測機器や演算装置などを搭載した上でも、さらに余裕のある耐荷重性能を提供します。
(1) 可搬重量約120kgを実現しつつ、静粛・正確な動作が可能
4WDSローバー X120Aは、四輪独立のステアリング機構(4WDS構造)を搭載しつつ、シリーズ最大となる約120kgの可搬重量を実現しています。超大型の機体でありながら、実測で1.6m/sの動作性能や、四輪独立サスペンションによる安定した稼働など、高い実用性と安定性を備えています。
弊社製の研究開発用台車ロボットシリーズは、研究・開発用途に特化した台車ロボットという性質上、多種多様な研究用途に用いられ、計測機器や演算装置などを台車ロボットに搭載したいというご要望を多くいただきます。本製品においては、研究開発用機材を台車ロボットに搭載しても、さらに余裕のある積載重量となっており、搬送・物流といった具体的な用途を見据えた研究目的に適しています。
特に、4WDS構造でありながら可搬重量約120kgを実現したモデルは弊社としてシリーズ初の開発・発売であり、「メガローバーF120A」「メカナムローバーG120A」と合わせて、研究開発用台車ロボットの超大型モデルのラインナップがさらに充実しました。車輪の方式が異なる各シリーズの中でも、本製品は特に静粛性とステアリング動作の正確性に優れており、アルミフレームによる柔軟なカスタマイズ性能と組み合わせることで、これまでにない研究・開発プロジェクトの遂行を支援します。

(※)本製品は乗用を意図して設計されたものではありません。
また、大型の機体のため、開発や運用には十分な注意をお願いいたします。
(2) 全ての駆動輪に独立したステアリングを搭載(4WDS構造)
4WDSローバー X120Aでは、搭載する四つの駆動輪全てに独立して制御できるステアリング機構を備えています。それぞれの駆動輪の角度や回転速度を適切に制御することで、台車ロボットの向きを変更しないまま前後・左右方向への移動が可能なほか、車輪を横滑りさせることなく超信地旋回(その場旋回)することもできます。また、各車輪にはサスペンション機構を備えており、四輪が正しく路面に接地することで、直進性や制御の正確性が得られます。
オムニホイールやメカナムホイールなど、他の全方向移動用車輪と比較し、車輪そのものがシンプルな構造をしているため、汚れや砂塵に強いという点も特徴です。
(※)本製品は屋内専用です。屋外での使用は想定しておりません。

(3) 有線 / 無線接続による制御が可能
4WDSローバー X120Aは、Wi-Fiによる無線通信と有線のUSBシリアル通信に対応しています。指定のコマンドを用いることで、PCやタブレットなど、様々なデバイスから制御することが可能です。
また、ロボット用無線コントローラー「VS-C3」が標準で付属するため、PC等を接続しなくても本体を無線操縦することができます。アナログスティックを使用して、前後へ移動、回転させることもでき、動作確認のための手動操縦、非常時の操作手段等として使用可能です。

(4) 複雑な制御を容易に実装可能
四輪独立ステアリング機構で正確な移動を実現するためには、各車輪の角度と速度を適切に制御する必要があります。本製品にはあらかじめ四輪独立ステアリング機構の制御システムが組み込まれているため、ユーザーは並進移動速度と旋回速度を指定するだけで、本製品を自由に走行させることが可能です。移動機構を利用したソリューション全体の開発期間を短縮できるとともに、成果物の価値を向上させることに注力できます。
(5) Arduino IDEでプログラム可能
本製品に搭載されている制御ボード「VS-WRC058c」には、ESP32-WROOM-32マイコンが搭載されており、Arduino IDEを用いて制御プログラムを作成することができます。サンプルコードはArduinoライブラリーの形で製品に付属し提供されますので、ユーザー自身の手でファームウェアのカスタマイズを実施することも可能です。
(※) VS-WRC058cをArduino IDEを用いてプログラミングする場合、Arduino IDE 1.8.13以上が動作する
環境が必要です。
(6) 拡張しやすいアルミフレームを採用
本製品の本体フレームはアルミ部材にて構成されています。十分な強度を持つと同時に加工が容易なので、ユーザー自身の手で、様々な拡張を容易に行うことができます。上部天板に取り付け穴を開けて部品を追加することも可能で、研究・開発の推進に欠かせない自由な拡張性をもたらします。
(7) ROS1による制御に対応
4WDSローバー X120AはROS(ROS1)メッセージ通信に対応しており、ROSが動作するデバイスとWi-FiまたはUSBケーブルで接続することで、rosserialのパッケージを用いたROS1のメッセージ通信が可能です。
標準ファームウェアでは、geometry_msgs/Twist型を使って、ROSから本製品に対して移動速度指令値を送信したり、本製品から現在速度やバッテリー電圧を取得したりすることが可能です。また、ユーザーの手によってファームウェアを変更することで、上記の他にも任意のメッセージを送受信することが可能です。
なお、ROSを動作させるデバイスは別途ご用意いただく必要があります。弊社で推奨するデバイスの動作環境は次の通りです(本製品に含まれないライブラリーなどのセットアップが追加で必要になる場合があります)。
【ROS使用時の推奨動作環境】
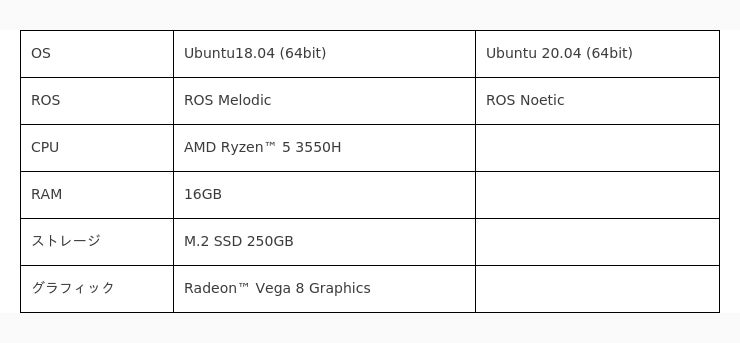
(※)上記条件を満たしていても、相性などにより、正常に動作しない場合があります。
(※)仮想環境は、タイムラグにより安全な制御が行えない場合があり、推奨しておりません。
(8) 非常停止スイッチを標準搭載
4WDSローバー X120Aには非常停止スイッチが標準搭載されています。本体から張り出したフレームに固定されているため、運用中のスイッチの押下をスムーズに行えます。

(9) 多彩なオプション品に対応
4WDSローバー X120Aは数多くのオプション品に対応しています。用途に合わせてセンサーや構成部品を追加することが可能で、多様な研究・開発分野にて、大型の研究開発用台車ロボットの能力を存分に活用することができます。
")
")
")
")
■本製品のYouTube動画
■構成図

(※)VS-WRC058cには、複数のホストと同時に通信する機能はありません。
(※)LRF(LiDAR)とデプスカメラは、Raspberry Pi 4に接続することも可能です。
■本体仕様
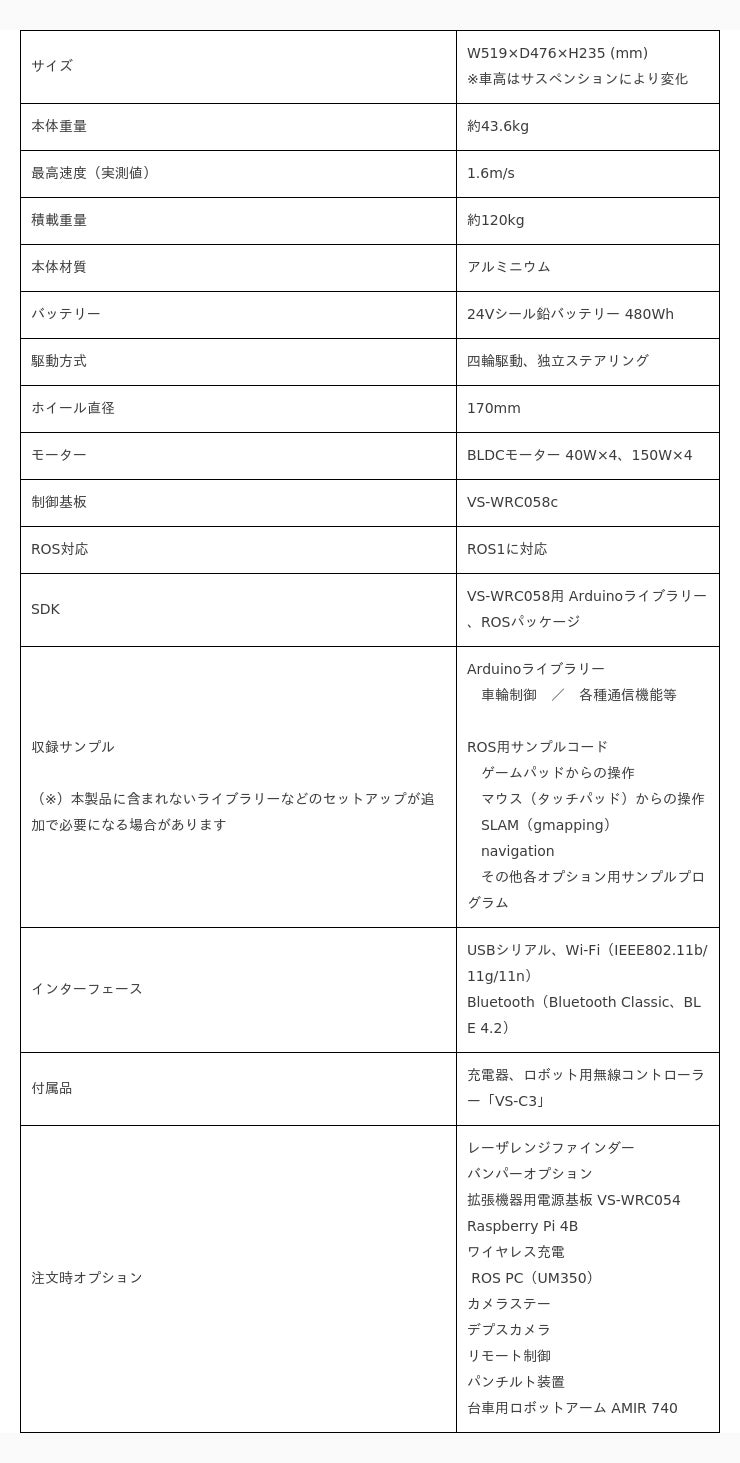
(※)本製品は屋内専用です。屋外での使用は想定しておりません。
また、製品の仕様は予告なく変更となる場合があります。
■販売について
ヴイストン株式会社の公式Webショップにてご注文を受け付けます。本製品は受注生産品です。また、掲載価格は作成時点のものであり、変更される場合があります。
・4WDSローバー X120A : オープン価格
製品ページ: https://www.vstone.co.jp/products/wheelrobot/x120a.html
販売ページ: https://www.vstone.co.jp/robotshop/index.php?main_page=product_info&products_id=5367
・LRFオプションTG30 / 1式:88,000円(10%消費税込み)
機体周囲の障害物等を検知するLRFを取り付ける、本体注文時の有償オプションです。機体の前後左右に取り付けが可能です。
・バンパーオプション(前後) / 1式:88,000円(10%消費税込み)
壁等との衝突を検知できるバンパーセンサをロボットの前後に取り付ける、本体注文時の有償オプションです。
・バンパーオプション(全周囲) / 1式:176,000円(10%消費税込み)
壁等との衝突を検知できるバンパーセンサをロボットの全周囲に取り付ける、本体注文時の有償オプションです。
・拡張機器用電源基板オプション VS-WRC054 / 1式:44,000円(10%消費税込み)
Raspberry Pi 4BやROS PC(UM350)オプションなどの拡張機器を搭載した際に本体のバッテリーから電源を供給する、本体注文時の有償オプションです。Raspberry Pi 4Bオプション搭載時およびROS PC(UM350)オプション搭載時には必須となります。
・Raspberry Pi 4Bオプション / 1式:14,300円(10%消費税込み)
Raspberry Pi 4B 4GB版を取り付けて出荷する、本体注文時の有償オプションです。拡張機器用電源基板オプション VS-WRC054が別途必要です。SDカードおよびOSイメージは付属しません。
・ワイヤレス充電オプション / 1式:330,000円(10%消費税込み)
無線充電の機能を追加する、本体注文時の有償オプションです。機体の前後左右に取り付けが可能です。
・ROS PC(UM350)オプション / 1式:253,000円(10%消費税込み)
4WDSローバー X120Aに、ROSで制御するための環境構築済みPCを取り付ける、本体注文時の有償オプションです。拡張機器用電源基板オプション VS-WRC054が別途必要です。
・カメラステーオプション / 1式:16,500円(10%消費税込み)
別売のデプスカメラなどを固定できるカメラステーを取り付ける、本体注文時の有償オプションです。天板から265mmまでの任意の高さにカメラを固定でき、固定角度も調整可能です。理想的なカメラ位置・角度で運用が可能です。
・デプスカメラオプション / 1式:108,900円(10%消費税込み)
4WDSローバー X120Aに、深度情報を含んだフルカラーRGB画像が取得できるステレオカメラ(RGB-Dカメラ)を搭載する、本体注文時の有償オプションです。「カメラステーオプション」に含まれるカメラステーも本オプションに含まれます。
・リモート制御オプション(PCなし) / 1式:123,200円(10%消費税込み)
4WDSローバー X120Aに搭載するPC内でZoom社のWebミーティングを実行しつつ、遠隔地から台車ロボットの操縦を可能とする、本体注文時の有償オプションです。本オプションにおいてはPC本体は別売となるほか、付属するドキュメントに従って専用サーバーなどの準備が別途必要となります。
・リモート制御オプション(PCあり) / 1式:420,200円(10%消費税込み)
4WDSローバー X120Aに搭載したPC内でZoom社のWebミーティングを実行しつつ、遠隔地から台車ロボットの操縦を可能とする、本体注文時の有償オプションです。本オプションにおいてはPC本体も含まれますが、付属するドキュメントに従って専用サーバーなどの準備が別途必要となります。
・パンチルト装置オプション(カメラなし) / 1式:66,000円(10%消費税込み)
台車ロボットの天板に搭載可能なステーと、パン・チルトそれぞれに可動軸を持つカメラ台とを追加するオプションです。
・パンチルト装置オプション(カメラ付き) / 1式:154,800円(10%消費税込み)
台車ロボットの天板に搭載可能なステーと、パン・チルトそれぞれに可動軸を持つカメラ台とを追加するオプションです。対応するデプスカメラが付属します(ROS PC(UM350)オプションなど、デプスカメラを接続するためのROSデバイスが別途必要です)。
・台車用ロボットアーム AMIR(アミル) 740 / 1式:770,000円(10%消費税込み)
台車ロボットへの搭載に適したROS対応のロボットアームです。アーム単体での可搬重量2kgを実現しており、台車ロボット単体では難しい、対象物を掴む・持ち上げる・移動させるといった、複雑で多彩な用途に応用が可能です(ROSで制御する場合、ROS PC(UM350)オプションなどのROSデバイスが別途必要です)。
■寸法図

■本件に関するお問い合わせ先
ヴイストン株式会社
〒555-0012 大阪府大阪市西淀川区御幣島 2-15-28
E-mail: infodesk@vstone.co.jp
https://www.vstone.co.jp/
Arduinoは、Arduino AGの登録商標です。
AMD、AMD Ryzen、Radeonは、Advanced Micro Devices, Inc.の登録商標または商標です。
UbuntuはCanonical Ltd.の商標または登録商標です。
ZoomはZoom Video Communications, Inc.のサービスであり、ZoomロゴはZoom Video Communications, Inc.の登録商標です。
Bluetooth(R)は、Bluetooth SIG, Inc. USAの登録商標または商標です。
Raspberry PiはRaspberry Pi財団の登録商標または商標です。
ROSは、Open Source Robotics Foundation, Inc.によるオープンソースのプロジェクトです。
Wi-Fiは、Wi-Fi Allianceの登録商標です。
その他、記載されている製品名などの固有名詞は、一般に各社の登録商標または商標です。
企業プレスリリース詳細へ
PRTIMESトップへ
※ ニュースリリースに記載された製品の価格、仕様、サービス内容などは発表日現在のものです。その後予告なしに変更されることがありますので、あらかじめご了承下さい。






























