[ ICT ]
【電子版】米アップル、自動運転で周囲の物体の検知性能向上 「ライダー」補完技術を開発
(2017/11/24 12:00)
-
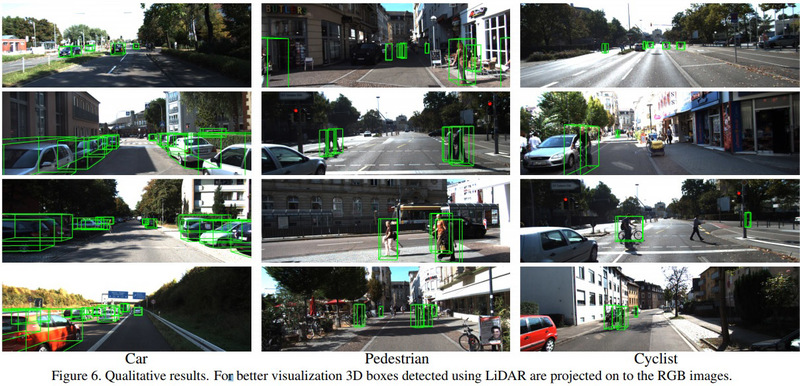
VoxelNetでは、車や自転車、歩行者を認識しボックスで囲って表示する(arXivの論文から)

自動運転車に搭載された3次元(3D)ライダー(LiDAR、レーザーレーダー)が捉えた点群データをもとに、周囲に存在する車や自転車、歩行者などを効率的に検出する技術を米アップルの人工知能(AI)研究者らが開発した。機械学習を応用したもので、最先端のライダーを使った場合の検出精度を上回ったという。成果は米コーネル大学図書館が運営する論文共有サイト「arXiv(アーカイブ)」に投稿された。
ライダーは光レーザーをパルス状に照射し、反射して返ってきた散乱光から対象物までの距離や深さ情報を検出する技術。ただ、アップルの研究者の報告によれば自動運転にライダーを使う場合、反射光から得られる点群データがまばらなことが物体を識別する上での課題となっているという。そのため、補完手段としてカメラやレーダーなどほかの物体検出技術とライダーとを併用するケースもある。
今回開発された「ボクセルネット(VoxelNet)」と呼ばれる技術では、まばらな3Dの点群データをもとに体積を持った3D表示単位の「ボクセル」を作製。ボクセルを組み合わせることで効率的に周囲の物体の3D形状を得られ、車や自転車、歩行者などを認識し、かつそれらの画像を四角い枠で囲って表示できるようにした。
自動運転車だけでなく、掃除ロボットをはじめとする家庭用ロボット、拡張現実(AR)・仮想現実(VR)などにも応用可能としている。
(2017/11/24 12:00)





























