企業リリース Powered by PR TIMES
PR TIMESが提供するプレスリリースをそのまま掲載しています。内容に関する質問 は直接発表元にお問い合わせください。また、リリースの掲載については、PR TIMESまでお問い合わせください。
(2020/3/25)
カテゴリ:商品サービス
リリース発行企業:ヴイストン
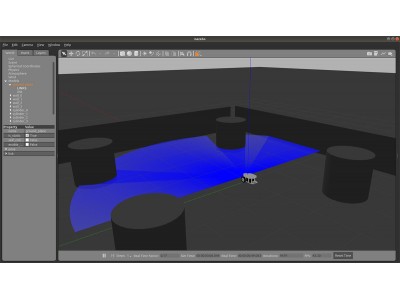
シミュレーター上でROSプログラムによる動作やSLAMなどが可能に
ヴイストン株式会社(本社:大阪府大阪市、代表取締役:大和信夫)は、実機を使わなくともシミュレーター上でROSプログラムの動作やLRFを用いたSLAMの確認が可能な、「ROS対応3Dシミュレーターモデル メガローバー版」の配布を開始します。

■主な特徴
好評発売中のメガローバーは、可搬重量約40kgの大型筐体に加え、ROS対応でArduino互換の制御ボードや、豊富な注文時有償オプションなどの特徴を備えており、弊社の研究開発用台車ロボットの中核モデルとして、様々な用途に活用いただいています。メガローバーにおいては、ROSでのプログラム開発が行えるため、様々な環境・用途に合わせた運用ができる反面、大型の機体であることから、動作プログラムの開発と検証に一定の空間や動作上の安全確認が必要となる点が、プログラム開発上の一つのネックとなっていました。
このたび配布を開始するROS対応3Dシミュレーターモデル メガローバー版は、オープンソースの3Dシミュレーターである「Gazebo」に対応したモデルファイルで、Gazebo上で仮想的にメガローバーを動作させることが可能です。これにより、ROSプログラムの動作確認や検証をメガローバーの実機がなくとも実行できるほか、大型台車ロボットを実際に動作させる前にシミュレーター上で安全確認を行いたいといった用途にも活用できます。
(1) 3Dシミュレーター内で、安全かつ手軽に動作確認が可能
これまで、メガローバーの動作確認時には必ず実機を用いる必要があり、動作時の周囲の安全確認、バッテリーの充電管理、稼働中の動作監視など、大型台車ロボットならではの取り扱い上の注意点が多くありました。
本モデルを用いると、3DシミュレーターのGazebo上でメガローバーを仮想的に動作させることが可能となります。そのため、基本的なプログラム動作確認をシミュレーター上で行い、プログラム内容のブラッシュアップを済ませたのちに、実機で動作確認を行うという開発工程を踏むことができます。
シミュレーター上での動作内容は実機と完全に一致するものではないため、実機での動作確認は必要となりますが、開発工程全体で実機を動かす回数を減らすことができ、動作プログラム作成の省力化に寄与します。

(2) プログラム作成時の問題切り分けツールとして活用可能
台車ロボットのプログラム作成において「ロボットがうまく動かない」等の事象が発生する時、その原因がプログラム起因であるか、ハードウェア起因であるか、あるいはロボット単体の問題ではなくネットワークや他デバイスとの接続問題であるかなど、発生箇所の可能性が多岐にわたり、特定が困難である場合があります。
本モデルを用いると、シミュレーター上でプログラムを実行することにより、理想的な状態でのプログラム実行結果を確認することができます。こういった行程を踏むことで、問題がどこで発生しているかを把握することが、より迅速になることが期待できます。
(3) シミュレーターのモデルは独自に拡張が可能
本モデルはメガローバーの標準機体をシミュレーションしていますが、ユーザーの手元でモデルの追加や編集が可能です。実使用の環境に合わせたシミュレーションの準備を行っていただくことで、ユーザー毎で異なる動作環境でのシミュレーションを実行することができ、実行結果の有用性が高まります。
(4) ロボット本体が手元になくてもシミュレーションを実行可能
本モデルはシミュレーター内で完結して利用でき、メガローバー本体は必要ありません。そのため複数人でロボット本体をシェアして開発を進める場合などにおいても、より効率の良いプロジェクトの進行に寄与します。
メガローバーをROSロボット教育用の教材として活用するといったシーンや、メガローバー購入前の動作確認といった用途にも合致します。

■ご注意ください
本モデルは、3Dシミュレーター「Gazebo」上でメガローバーの基本的な動作確認を行うことを目的としています。Gazeboの能力を超えるシミュレーションには対応できないほか、厳密に実機と同じ挙動をシミュレーションすることを目的としたものではありません。最終的な動作確認は実機のメガローバーを使うことを強く推奨します。特に、摩擦係数については厳密に実装されていませんので、重量物を搭載した場合のシミュレーションなどについては、現実との差異が大きくなる可能性があります。
また、ROS対応3Dシミュレーターモデル メガローバー版として配布されるものは、あくまでシミュレーター用のモデルファイルとそれに付随する情報のみとなっています。メガローバーの実機に関する情報は、本モデルに付随しては提供されません。
■配布場所
・ROS対応3Dシミュレーターモデル メガローバー版
配布ページ:https://www.vstone.co.jp/products/wheelrobot/ver2.1.html
Github:https://github.com/vstoneofficial/megarover_samples/
※Arduinoは、Arduino AGの登録商標です。
※ROS、Gazeboは、Open Source Robotics Foundation, Inc.によるオープンソースのプロジェクトです。
※その他、記載されている製品名などの固有名詞は、一般に各社の商標または登録商標です。
ヴイストン株式会社
公式サイト https://www.vstone.co.jp
お問い合わせ:infodesk@vstone.co.jp
企業プレスリリース詳細へ
PRTIMESトップへ
※ ニュースリリースに記載された製品の価格、仕様、サービス内容などは発表日現在のものです。その後予告なしに変更されることがありますので、あらかじめご了承下さい。






























