[ ロボット ]
東北大、縦横無尽に動作できるクローラー-災害調査ロボなどに提案
(2016/8/24 05:00)
-

開発した全方位クローラー「オムニボード」
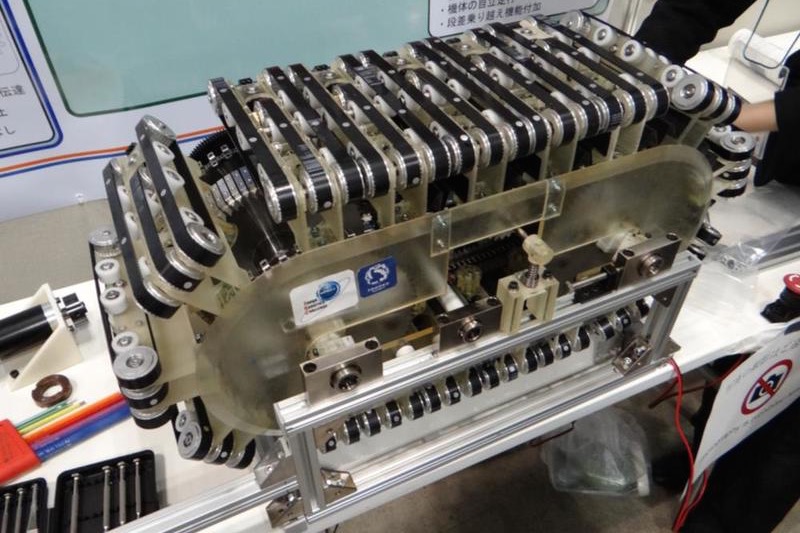

東北大学大学院情報科学研究科の高根英里大学院生と多田隈建二郎准教授らは、縦横斜め、全方位に動けるクローラー「オムニボード」を開発した。階段の踊り場など、方向転換できない場所でロボットが立ち往生してしまうことがなくなる。災害調査ロボや無人建機の駆動機構に提案していく。
一般にクローラーは外周ベルトがたわんで地面に広く接地できるため、がれきの上でも安定して走行できる。だが向きを変えられず、横方向へ移動できなかった。そこで複数の小さなクローラーを平行に連結してベルト状に束ねた。このクローラー連結べルトを大きなクローラーの外周ベルトに利用した。大クローラーが前後、小クローラーが左右方向に回転する。
複数のクローラーを二つのモーターで制御するため、ベルト状のギアを設計した。ベルト状ギアと大クローラーの回転に差ができると小クローラーに力が伝わり、左右方向に回転する。その場で左右に進むことも斜めに進むこともできる。
ベルト状のギアがたわむため、大クローラーが地面にならって接地面積を増やせる。全体の走破性が落ちない。クローラーの高さに対して10―15%の凹凸があっても、地面に接地して進める。
がれきの隙間や急斜面など、その場で旋回できない状況でも横や斜めに進んで障害物を避けられる。現在は試作機を使って動作原理を実証した段階。今後は防水などの機能を追加し、雨の中などでも走れるよう改良していく。
(2016/8/24 05:00)
関連リンク
科学技術・大学のニュース一覧
- 東北大、縦横無尽に動作できるクローラー-災害調査ロボなどに提案(16/08/24)
- 千葉大、治療用遺伝子の移植で臨床試験−難病患者に適用(16/08/24)
- 拓く研究人(133)慶応義塾大学理工学部物理情報工学科准教授・安藤和也氏(16/08/24)
- 理研、バイオ樹脂生産する海の光合成細菌を発見−石油系樹脂の代替材に(16/08/24)
- 米国化学会「ロジャー・アダムス賞」、山本中部大教授が受賞(16/08/24)
- 国立環境研究所、江戸東京博物館で市民公開シンポ(16/08/24)
- 土木研究所、来月6日に新技術紹介(16/08/24)
- 経営ひと言/東京薬科大学・渡邉一哉教授「発電菌が起爆剤」(16/08/24)






























