企業リリース Powered by PR TIMES
PR TIMESが提供するプレスリリースをそのまま掲載しています。内容に関する質問 は直接発表元にお問い合わせください。また、リリースの掲載については、PR TIMESまでお問い合わせください。
(2024/4/4)
カテゴリ:商品サービス
リリース発行企業:株式会社FingerVision

【大学発触覚センシング技術を開発するFingerVision】

視触覚ハンドを購入しなくても、FingerVisionの技術を活用したPoCを簡単にスタート
大学発の「視触覚」技術の実用化を通じて、ロボットや機械の適用範囲を広げ、様々な社会課題を解決することを目指す株式会社FingerVision(代表取締役:濃野友紀、以下FingerVision)は、ロボットを活用した自動化・省人化の調査・検討・検証(PoC)を進めている会社(以下ユーザ企業)向けに、視触覚ハンドを購入しなくても、FingerVisionの技術を活用したPoCを簡単にスタートできるサービスを開始しました。「新しい技術で興味はあるが、買っても自分たちでは使いこなせない」、「そもそも購入の予算をとるために、何がどこまでできるのか把握したい」といったユーザ企業向けに、検証結果をまとめたレポートや動画などをご提供致します。
"視触覚ハンド"PoCサービスの内容
- 概要
- - ユーザ企業各社が抱えているニーズに沿って、視触覚センサを活用した自動化の簡易検証を行い、検証結果をまとめたレポートや動画を提供します
- - ロボットや視触覚ハンドを活用した検証は、FingerVision、もしくは経験値のあるロボット・システムインテグレータが行います
- 成果物イメージ
- - レポート(ユーザ企業内稟議や社内資料に活用いただける情報)
- - - 基本情報:ワークサイズ、タスク内容等
- - - 実施条件:ロボット等使用機器、各種パラメータ、動作距離、治具等
- - - 検証結果:タスクの成功率、条件違いによる比較検証、取得可能な情報(力分布、異物検知)等
- - - 分析情報:成功率アップのための施策・懸念点、タクトを短縮するための施策、他の手法との違い等
- - 動画
- 費用
- - 申込後、2回まで無償
- - 3回目以降は、基本コース 19.9万円~(税別)/回 (※特注コースは別途ご相談)
- サービスご利用の6大メリット
- - ローコストで検証ができる(購入しなくてよい)
- - プロの目線から、自動化ニーズを解決できるか、できないかを検証することができる
- - 過去すでにFingerVisionが検証している内容・経験値をすぐさま利用できる
- - 新しいバージョンの視触覚ハンドや技術(HW/SW)を使って検証できる
- - 検証結果のみならず、社内稟議を通すための「概算見積」を入手できる
- - 社内稟議が通れば、本提案や本見積を、技術力のあるロボット・システムインテグレータや商社等から受領することができる
- 申込方法
- - メールもしくはホームページの問い合わせフォームへのアクセス
- - - メール:contact@fingervision.jp
- - - 問合せフォーム:https://www.fingervision.jp/contact
- - サービス利用にあたっての利用規約への同意
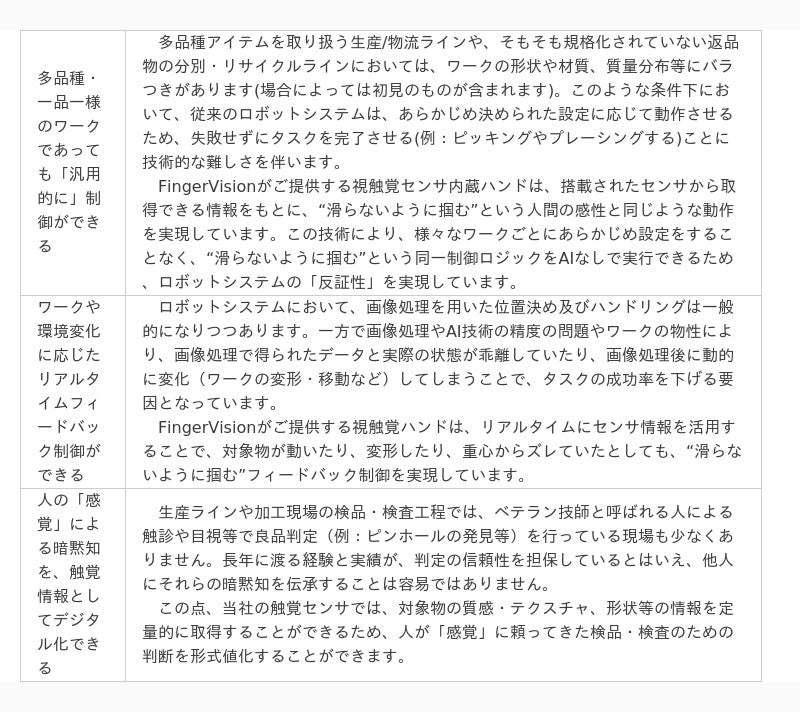
技術的な特徴と寄せられているニーズ
FingerVisionの視触覚ハンドは、一例を挙げると、以下のような利点があります。
・詳細動画:https://www.youtube.com/watch?v=8v-qn9iL1f8
実際、過去1年間だけでも、1,200件超える問合せ・相談・引き合いがFingerVisionに対してありました。
- ハーネスの搬送や組付けを自動化したい
- 薄いガラスやフィルムを扱いたい
- 柔らかいものを壊さずに扱う必要がある
- キッティング工程のように多品種アイテムを扱いたい
吸着方式や電動チャックで過去検証したが、失敗することがある
- コネクタ嵌合のように、タスクが完結しているか確かめられない
- 偏荷重があり重心が変化すると、掴み上げた後に落としてしまう
- 高速でロボットを動かすと慣性力で飛んでいってしまう
- 人が手で触って検査している工程のデータを取得し、自動化したい
- ・・・
こういった自動化に対するお悩みに対して、手軽にはじめられる検証として、是非”視触覚ハンド"PoCサービスご利用ください。
本サービスへの問い合わせ・申し込みは、メールもしくはホームページの問い合わせフォームよりご連絡ください。
・メール:contact@fingervision.jp
・URL: https://www.fingervision.jp/contact
(ご参考)検証動画イメージ
人の触覚に相当する「力分布」や「滑り分布」などをロボットの制御に活用した場合と、活用しなかった場合での違い、などの検証結果を動画で分かりやすくお伝えします。
https://www.youtube.com/watch?v=bZeFwQkTvoI
https://www.youtube.com/watch?v=CMEV9MtHi1E
https://www.youtube.com/watch?v=r01uaqAnozs
◆会社概要
・社名: 株式会社FingerVision
・代表取締役: 濃野友紀
・開発拠点:
・東京都江東区東陽二丁目4番1 4号 三井ウッディビル1F ※移転しました
・京都府京都市下京区朱雀宝蔵町73-1 ライトワンビル1F
・設立: 2021年10月
・会社HP:https://www.fingervision.jp/
・YouTube: https://www.youtube.com/channel/UCRgZuTJvDxjD_7ta03BRQFA
・LinkedIn: https://www.linkedin.com/company/fingervision/
・X/Twitter: https://twitter.com/Yuki_Nono_fv
・メール:contact@fingervision.jp
◆技術概要
「画像(カメラ)をベースに触覚を再現する」というコンセプトをコア技術としています。ロボットハンド等の指先に搭載することで、触覚(力や滑りの分布等)を知覚できるようになり、あたかも人が「手のひら」の感覚を使って物体を扱うような制御をロボットで実現できます。高機能(高分解能・マルチモダリティ)でありながら、経済性に優れる実用性の高さが特徴です。「触覚」センサとは言いつつも、把持対象物を見る(視覚)モダリティも備えた、まったく新しいコンセプトの「視触覚センサ」であり、ロボットと組み合わせたプロセス自動化だけでなく、無限の応用可能性を持ちます。
企業プレスリリース詳細へ
PRTIMESトップへ
※ ニュースリリースに記載された製品の価格、仕様、サービス内容などは発表日現在のものです。その後予告なしに変更されることがありますので、あらかじめご了承下さい。





























