企業リリース Powered by PR TIMES
PR TIMESが提供するプレスリリースをそのまま掲載しています。内容に関する質問 は直接発表元にお問い合わせください。また、リリースの掲載については、PR TIMESまでお問い合わせください。
(2018/3/12)
カテゴリ:商品サービス
リリース発行企業:株式会社メルティンMMI
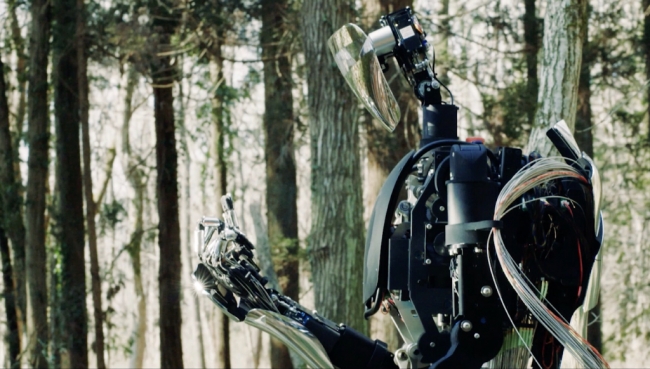
株式会社メルティンMMI(本社:東京都新宿区、代表取締役:粕谷昌宏、以下、MELTIN)は、2018年3月12日(月)に独自開発のアバターロボット「MELTANT-α(メルタント・アルファ)」を発表しました。
MELTINは身体による限界を突破し、人類の創造性を開放するためのサイボーグ技術の開発を目指しています。その第一歩として、身体の動作を忠実に解析する「生体信号処理技術」と、生体模倣から着想を得た「ロボット機構制御技術」をコア技術とするサイボーグ技術を使って、実用可能な「筋電義手」を開発してきました。
MELTANT-αはそのサイボーグ技術のノウハウを活かして開発したアバターロボットのコンセプトモデルです。人に最も近い「手」の動作が可能なこのモデルは、柔軟性、スピード、パワー、耐久性、緻密さ、などの複雑な動きができるため、世界のどこへでも進出可能な「もうひとつの身体」となります。
▼ダウンロード: ニュースリリース PDF (3.8MB)
https://prtimes.jp/a/?f=d32398-20180312-6249.pdf
1. 生体模倣により、力強さと器用さを兼ね備えた世界初のロボットハンドを実現
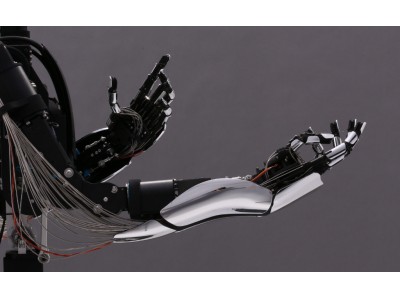
MELTANT-αの手の動作構造は、人の身体、特に筋肉と腱の構造を徹底的にリサーチし、人の手を“生物模倣”することから着想を得ています。人の手は、複数の筋肉群が複数の関節を動かすことによって動作します。MELTINはこの人の手の複雑な動作をワイヤー駆動によって再現し、従来のロボットでは考えられない力強く繊細な動きが、人の手と同等のサイズ・重量で可能になりました。
この技術は世界でもまだ前例がなく、人の手が持つ繊細さ、器用さ、力強さといった特徴を、ひとつの手で構成できる、まったく新しいテクノロジーです。

パワー
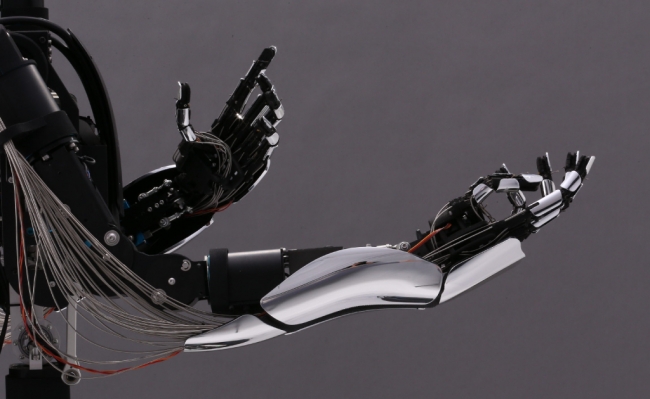
手の構造を模倣したワイヤー駆動により、片手でも2kgのボトルを持ち上げたり、4kg以上の物体を両手で支えるといった強力な動作が可能。この技術はアクチュエータに依存しないため、油圧など他のアクチュエータと組み合わせることが可能です。
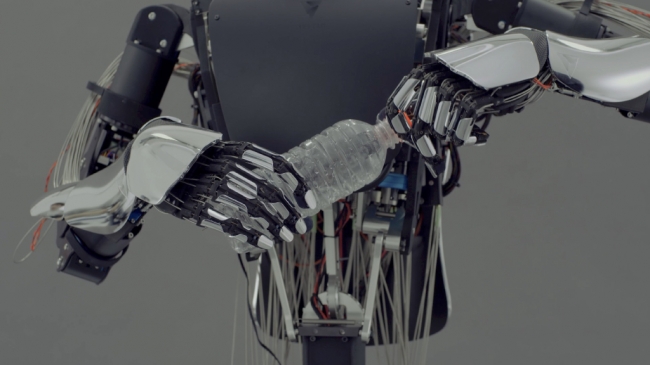
繊細さ
従来の技術ではワイヤー駆動は制御が難しく、人の手のような繊細な動きを再現することは困難でした。しかしMELTANT-αは独自の制御アルゴリズムによって、卵を割らずにつかんだり、ペットボトルのキャップを開けたりするような、緻密な動作を行うことが可能です。
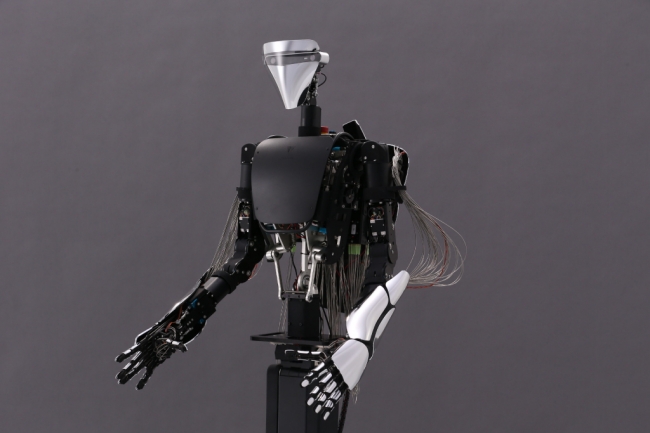
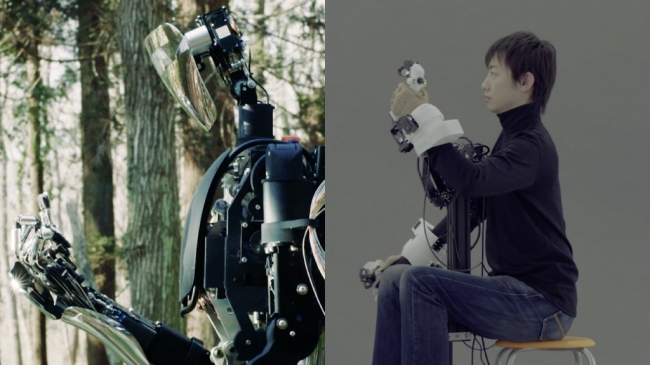
2. 地球の裏側や宇宙でも遠隔作業できる分身、多様な応用可能性
MELTANT-αはさらに4つの優れた性質、遠隔操作性、リアルタイム性、耐久性、ハプティクスを備え、世界のあらゆる場所へ進出可能な「分身=アバター」となります。
遠隔操作性:18,900km離れた場所からの操作を実証
リアルタイム性:人の手の動作速度をほぼ遅延なく再現可能
耐久性:高い耐故障性とフェイルセーフ機能により過酷な環境でも作業可能
ハプティクス:力覚をフィードバックする事で力加減を調整可能
MELTANT-αは、力強さと繊細な動きを両立できないという、ロボットハンドが抱えていた最も重要な課題を解決した事で、従来は困難であった複雑な作業が可能となり、多様な分野で活用できる道が開けました。
MELTANT-αをベースとしてハンド単体、ハンド・アーム、全身の3プロダクトを展開します。
危険環境(災害、高所、高温、水中、化学・生物・放射能汚染、爆発物除去)
極限環境(宇宙、深海)
リモートワーク(遠隔勤務、アバター出張、夜間警備)
観光・エンタメ(アバター旅行)
農林水産・食品・物流(農作物収穫、魚介類捕獲、加工、ピッキング)
医療・福祉(介護、アバター外出、遠隔手術)


MELTIN MMI
MELTIN MMIは最先端の生体信号技術とロボット技術で構成されるサイボーグ技術を実現することで身体の限界を突破し、全ての人が何不自由なく幸せに生活できる世界を創ることを目指す研究開発型ベンチャーです。
WEBサイト: https://www.meltin.jp
企業プレスリリース詳細へ
PRTIMESトップへ
※ ニュースリリースに記載された製品の価格、仕様、サービス内容などは発表日現在のものです。その後予告なしに変更されることがありますので、あらかじめご了承下さい。






























