企業リリース Powered by PR TIMES
PR TIMESが提供するプレスリリースをそのまま掲載しています。内容に関する質問 は直接発表元にお問い合わせください。また、リリースの掲載については、PR TIMESまでお問い合わせください。
(2021/4/28)
カテゴリ:商品サービス
リリース発行企業:ヴイストン

Raspberry Pi4を搭載した高性能ロボットが、さらなる進化を遂げる
ヴイストン株式会社(本社:大阪府大阪市、代表取締役:大和信夫)は、既発売の二足歩行ロボットRobovie-Z(ロボビー・ゼット)にハンドユニットを追加した、「Robovie-Z Raspberry Pi版 ハンドユニット搭載」を発売します。

■主な特徴
Robovie-Zは、専用に開発されたサーボモーター・ロボット制御基板・フレーム構造を採用し、メイン基板としてRaspberry Pi 4 Model B(RAM容量4GB版)を搭載した、高性能二足歩行ロボットです。
今回発売する「Robovie-Z Raspberry Pi版 ハンドユニット搭載」は、既発売のRobovie-Zにハンドを開閉させる機能と肘ヨー軸を追加したバリエーションモデルです。安定した歩行を実現したRobovie-Zにハンド軸が追加されたことで、より多彩なモーションを実現することができ、開発・実験用途のほか、ホビー用途や競技会用などで、これまでにない幅広い活用を行うことができます。
本体は組み立て済みであるほか、通常版のRobovie-Zからハンドユニット搭載版への組み替えサービスも実施します。
(1) 左右の腕に開閉可能なハンド軸を搭載
Robovie-Zの通常版に搭載されている20軸に追加して、左右の腕に2軸ずつ(ハンド開閉軸および肘ヨー軸)のサーボモーターを搭載しました。これにより、左右のハンド開閉が制御できる構造となり、小型の物体を持ち上げることが可能です。
通常の無線コントローラーで発動するモーションとして「物体を持つ」機能を実装できるほか、Raspberry Pi基板を利用したVR操縦において活用したり、ハンド軸が前提となる競技会へ出場するなど、二足歩行ロボットとしての実用性・表現力や可能性が大きく向上しました。なお、Robovie-Zは小型機体であるため、実際に保持できる物体の重量・サイズには限界があります。ハンドを開いた場合の最大幅は約50mmです。

")
(2) ハンドユニット搭載機体への組み替えサービスを実施
すでに通常版のRobovie-Zをご購入済みのお客様向けに、「Robovie-Z ハンドユニット搭載サービス」を実施します。お手元のRobovie-Z機体を弊社にお送りいただき、ハンドユニットを搭載、調整後に返送いたします。詳細に関しては、弊社お問い合わせ窓口までご連絡ください。
なお、ハンドユニット搭載後は、重量バランスなどが通常版の機体と異なるものとなりますので、お客様が独自に実装されたモーションに関しては、再度の調整などが必要となる場合があります。弊社では、お客様が独自に実装されたモーションの調整は行っておりません。ご注意ください。
(3) Raspberry Pi 4を搭載し高度な処理が可能
本製品には、RAM容量4GBのRaspberry Pi 4 Model B基板が搭載されています。1.5GHz クアッドコアのARM(R) Cortex(R)-A72プロセッサーにより、画像処理やネットワーク連携など、これまでの二足歩行ロボットを超える高度な演算処理を、ロボット本体内で行うことができます。Raspberry Pi 4には冷却用のファンを装着しており、複雑な処理を安定して実行することが可能です。

(4) Raspberry Pi 4対応のカメラを標準搭載
本製品には、Raspberry Pi 4に対応した小型カメラ「Raspberry Pi Camera V2」を標準搭載しています。Raspberry Pi 4の処理能力を活用し、画像処理などの演算結果をロボットの動作に反映させることができるため、いわゆるAI処理などに基づいた高度な自律動作をプログラムすることができます。また、通常版のRobovie-Zとの大きな違いとして、自律動作において「物体を持つ」ことが挙げられます。これにより、画像認識を行い「選別した物体を持つ」など、高度で多彩な活用が可能となりました。
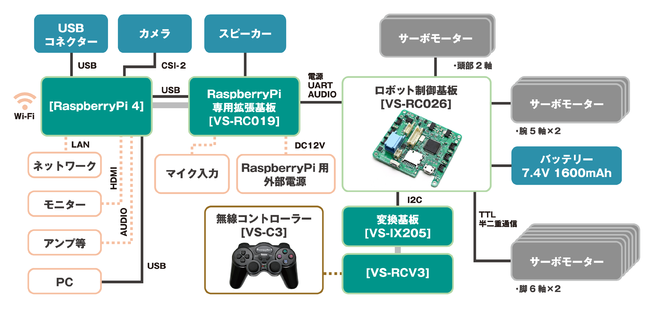
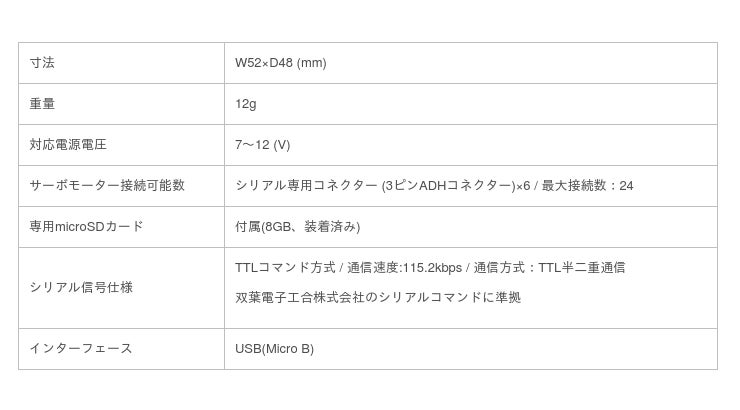
(5) 専用開発のロボット制御基板「VS-RC026」を搭載
本製品には、サーボモーターを直接接続するロボット制御基板として、専用に開発したVS-RC026が搭載されています。VS-RC026には3軸ジャイロセンサーや3軸加速度センサーも搭載されており、二足歩行ロボットとしての基本的な動作と制御を完結できるように設計されています。高度な情報処理はRaspberry Pi 4上で行い、サーボモーター等の直接的な制御はVS-RC026で行うことにより、Raspberry Pi 4の状態によらず、安定した動作制御が行えるものとなっています。
VS-RC026はシリアルサーボモーターに合わせて専用設計されており、サーボモーターの現在角度を取得する・サーボモーターの動作特性を変更するなど、双方向通信を利用した高度な制御が可能です。また、専用のモーション作成ソフトウェアとして「Motion Works(R) for VS-RC026」を付属しており、GUIを利用した効率的なロボットモーションの作成や、各種センサーを用いたプログラム作成を手軽に行うことができます。
(6) 各種センサー、無線コントローラーを搭載
本製品には、VS-RC026上に3軸ジャイロセンサー、3軸加速度センサーを搭載しています。また、専用無線コントローラーとして「VS-C3」も搭載しており、手動でのロボットの操縦にも対応しています。
(7) ROSに対応
本製品では、搭載されるRaspberry Pi 4上にROS Melodicを導入することが可能です。「Motion Works for VS-RC026」で作成・登録したモーションプログラムをROS経由で呼び出す、ロボット本体の簡単なステータスを取得するなどの機能を実現しています。外部のROSデバイスから任意のモーションを再生することができるため、様々な目的に合わせた活用が可能です。なお、ハンドユニットに関する追加項目については、関連資料を参照してください。
■構成図
■販売について
ヴイストン株式会社の公式Webショップにてご注文を受け付けます。本製品は受注生産品です。
・Robovie-Z Raspberry Pi版 ハンドユニット搭載 :330,000円(10%消費税込み)
製品ページ: https://www.vstone.co.jp/products/robovie_z/
販売ページ:
https://www.vstone.co.jp/robotshop/index.php?main_page=product_info&products_id=5333
・Robovie-Z ハンドユニット搭載サービス :33,000円(10%消費税込み)
販売ページ:
https://www.vstone.co.jp/robotshop/index.php?main_page=product_info&products_id=5332
■関連動画
本製品およびRobovie-Zに関連する動画を多数公開しています。
ハンドユニットが活躍する「テレイグジスタンスでテレワークしてみた」
https://www.youtube.com/watch?v=tFoOVfB000A
Robovie-Z関連の製品情報・技術情報を集めた再生リスト
https://www.youtube.com/watch?v=xWDbjj6xxZ4&list=PLQ7S4S06Y4cgIbS_Vb4Lbd-dsk_oT1QxS
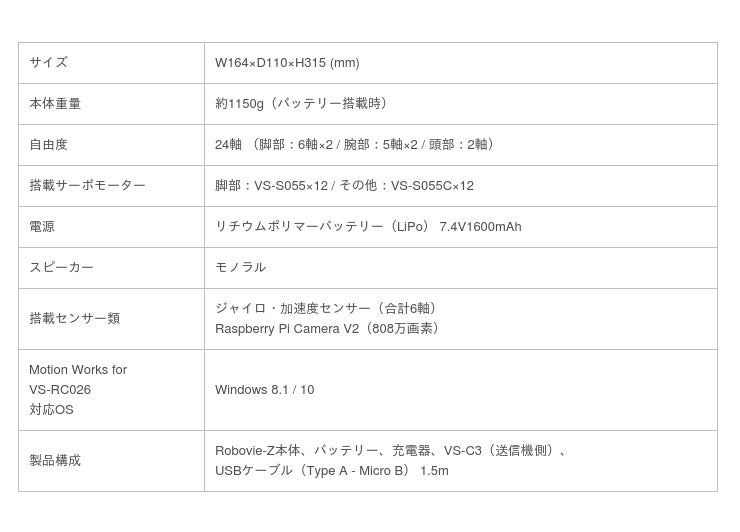
■本体仕様
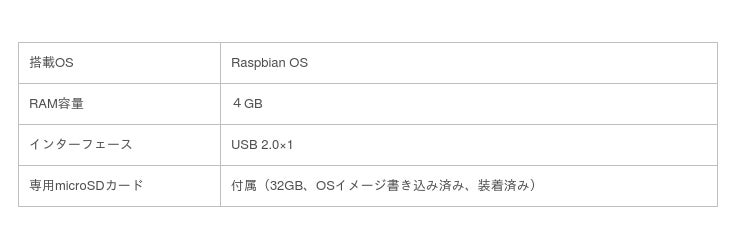
■Raspberry Pi 4 Model B仕様
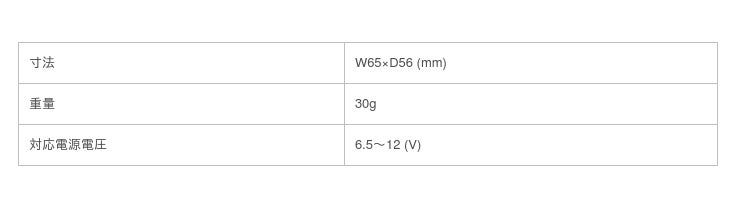
■Raspberry Pi 4専用拡張基板 VS-RC019 使用
■ロボット制御基板 VS-RC026 仕様
(※)本製品は屋内専用です。屋外での使用は想定しておりません。
また、製品の仕様は予告なく変更となる場合があります。
■本件に関するお問い合わせ先
ヴイストン株式会社
〒555-0012 大阪府大阪市西淀川区御幣島 2-15-28
E-mail: infodesk@vstone.co.jp
https://www.vstone.co.jp/
Motion Worksは、ヴイストン株式会社の登録商標です。
Robovie、ロボビーは、株式会社国際電気通信基礎技術研究所の登録商標です。
ARM、Cortexは、米国およびその他の国におけるARM Ltd.の登録商標または商標です。
UbuntuはCanonical Ltd.の商標または登録商標です。
Bluetooth(R)は、Bluetooth SIG, Inc. USAの登録商標または商標です。
microSDロゴ、microSDは、SD-3C LLCの登録商標または商標です。
Raspberry PiはRaspberry Pi財団の登録商標または商標です。
ROSは、Open Source Robotics Foundation, Inc.によるオープンソースのプロジェクトです。
その他、記載されている製品名などの固有名詞は、一般に各社の登録商標または商標です。
企業プレスリリース詳細へ
PRTIMESトップへ
※ ニュースリリースに記載された製品の価格、仕様、サービス内容などは発表日現在のものです。その後予告なしに変更されることがありますので、あらかじめご了承下さい。






























